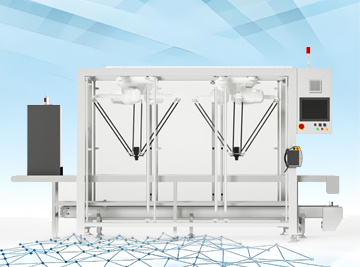
The self-designed high-speed flexible parallel robot is used for grasping movements, ensuring that products are not dropped during high-speed grasping and handling. It is widely utilized in the automatic identification, sorting, picking, handling, and packing of soft bags and boxed products like fast-selling food and meat.
The machine's structure design is precise, compact, and requires few spare parts for easy maintenance and repair, resulting in low maintenance costs.The compact design allows for efficient site utilization.
The control mode utilizes a handheld demonstrator, standard control buttons, and a signal switch for easy operation and convenient management.






